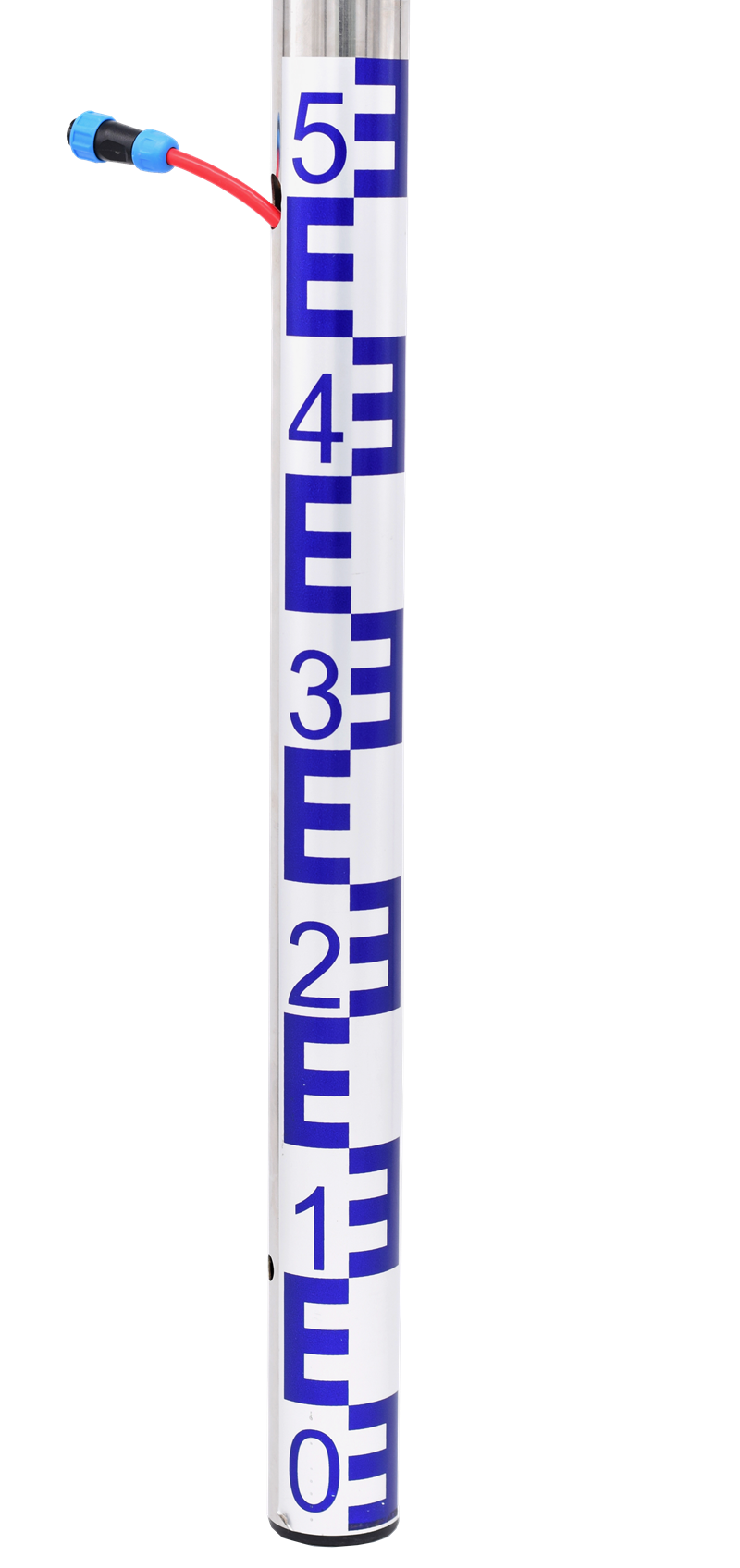
浮子式水位(机显)计
—
水利仪器仪表 - 水文监测
一、概述
浮子式水位计是集机、电技术于一体的数字化传感器,通过输出轴的角度位移量转换成相应的数字量,可以高精度测量被测液位高度,能确认绝对位置。具有断电记忆功能。
其工作原理就是:水位传感器测轮安装在编码器输入轴上,钢丝绳一端连接浮子、另一端连接重锤,钢丝绳绕在测轮上。当液位发生变化时浮子随液位的变化而升降,钢丝绳带动测轮转动,编码器输出相应的实时水位值。
该传感器结构合理,抗干扰能力强,分辨率高,量程大, 寿命长 ,有掉电后信号跟踪记忆功能。它能够长期用于液位测量并能保证性能的稳定可靠。
广泛适用于对江河湖泊、水库、船闸、水库、水电站、水文站、水厂、以及石油化工等地表水或地下水的水位测量。
二、技术参数
1、 基本参数
A 测量范围:0-80米;
B 水位变率:< 100厘米/分
C 分辨力:1cm
D 水位轮启动力矩:< 100克·厘米(0.0098N·m)
E 测量准确度:≤±2cm或0.2%F·S
F 显示器:十进制机械计数器
2、 机械参数
a 水位轮工作周长:32cm
b 测量缆:Φ0.8mm包塑不锈钢缆
c 浮子直径:10-15cm可选
3、 电参数
输出形式:接点通断输出 接触电阻:≤0.5Ω;绝缘电阻:≥10MΩ
4、 通信接口(选装)
RS485接口(MODBUS-RTU协议);
格雷码输出; 4-20mA电流模拟量输出;
5、 使用环境
a 环境温度:-40℃~85℃
b 相对湿度: ≤95%(40℃)
C 尺寸:132×132×115
D 电源电压:12VDC
三、工作原理
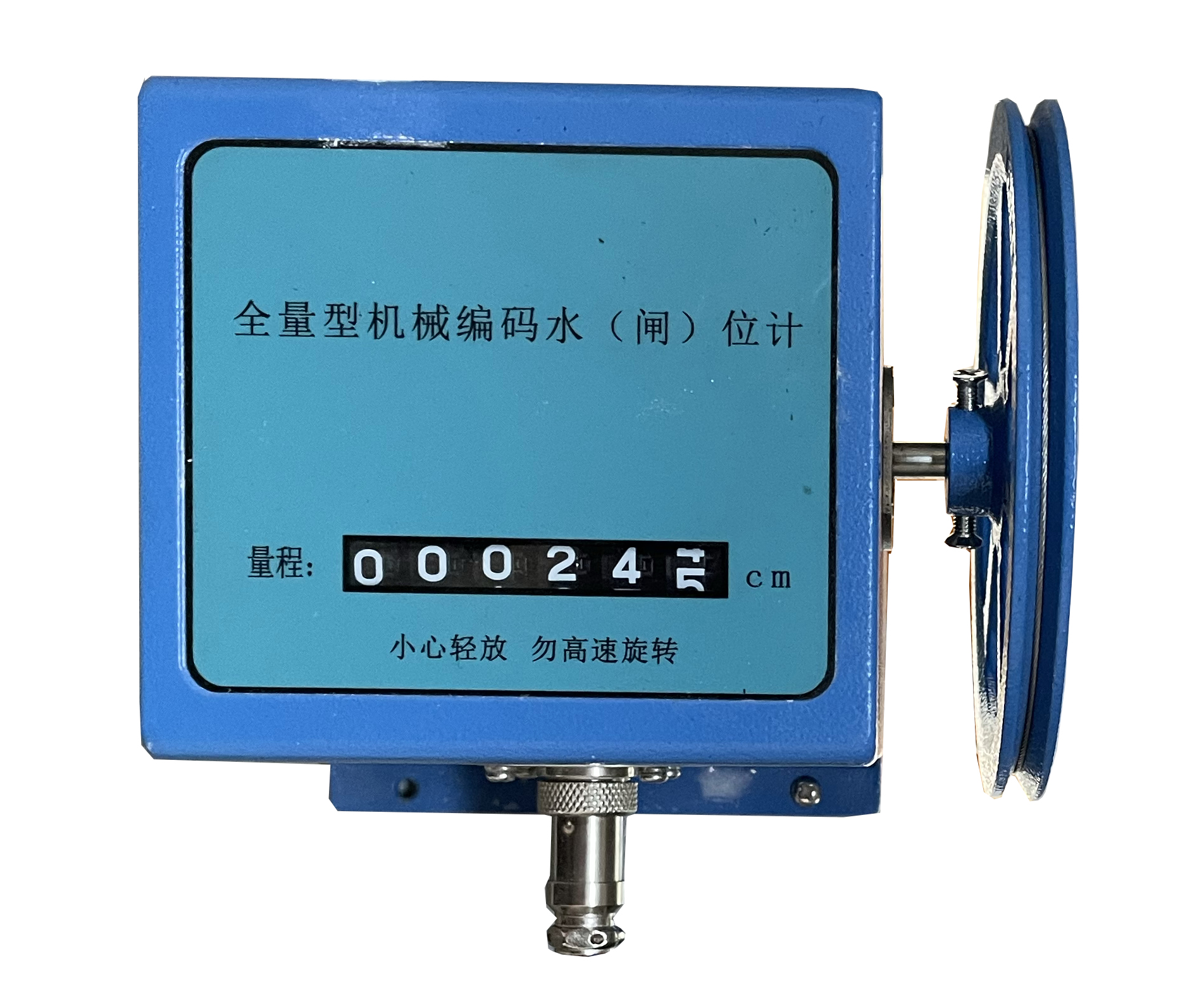
仪器结构、工作原理:
本仪器由浮子、钢丝绳、重锤、测轮、传感器、支架、输出插座等部分构成。
工作原理为:仪器以浮子感测水位变化,工作状态下,浮子、重锤与钢丝绳连接牢固,钢丝绳悬挂在水位轮的“V”形槽中。平衡锤起拉紧钢丝绳和平衡作用,调整浮子的配重可以使浮子工作于正常吃水线上。在水位不变的情况下,浮子与平衡锤两边的力是平衡的。当水位上升时,浮子产生向上浮力,使平衡锤拉动钢丝绳带动水位轮作顺时针方向旋转,水位传感器的显示读数增加;水位下降时,则浮子下沉,拉动钢丝绳带动水位轮逆时针方向旋转,
水位传感器的显示器读数减小。
本系列仪器中机械式水位传感器的水位轮测量圆周长为32厘米,且水位轮与传感器为同轴联接,水位轮每转一圈,传感器也转一圈,输出对应的32组数字编码。当水位上升或下降,传感器的轴就旋转一定的角度,传感器同步输出一组对应的数字编码(二进制循环码,又称格雷码)。不同量程的仪器能够输出1024至8192组不同的编码,可以用于测量10至80米水位变幅。
通过与仪器插座相联接的多芯电缆线可将编码信号传输给观察室内的电显示器或计算机,用作观测、记录或进行数据处理;安装有RS485数字通信接口的水位仪,可以直接与通信机、计算机相联接,组成为水文自动测报系统、水情卫星遥测系统。
仪器的内置式RS485数字通信接口(选装),具备选址、选通功能,能以二线制方式远距离传输信息,在一对双绞线信号线上可以驱动或接收31台水位(或闸位)传感器,实现遥测组网。
四、接线关系:
1、485接口(4芯航插):1-485A;2-485B;3-+12V;4-GND。
2、格雷码接口(19芯航插): 1—13为数据D0-D12,19为公共端。
3、模拟量接口(6芯航插):1-485A;2-485B;3-4-20mA +;4-4-20mA -;5-+12V;6-GND


四芯航插示意图 6芯航插示意图
五、仪器安装和校准
(1)、将仪器用4个M4×20螺钉固定在工作平台上。使浮子、平衡锤与测井内壁保持一定距离。
(2)、将Φ0.8mm不锈钢丝绳的一头从工作平台上方穿过平衡锤过线孔。
(3)、将重锤与钢丝绳固定、锁紧,然后将平衡锤慢慢沉放至井底。
(4)、将钢丝绳的另一端绕于水位轮的“V”型槽中,并预留长1.2米,剪断。
(5)、将钢丝绳穿过浮子过线孔,将钢丝绳与浮子悬吊帽固定、并在悬吊帽中塞入橡胶垫,然后将浮子帽与浮子拧紧。
(6)、将浮子慢慢沉放入测井,直至接触水面为止。
(7)、检查上述(1)至(7)步骤,如一切正常,可紧固水位轮的两个紧固螺钉。
(8)、校准:用手指轻轻地将钢丝绳提起,使其稍离开水位轮,然后转动水位轮,使机械计数器显示数值与实际水位值相符,然后再缓慢放下钢丝绳,使实际水位、机械显示和上位接收装置读到的数据一致(允许机械显示数与上位接收数相差一个字)。在现场或在观察室观测水位变化,如一切正常,即告仪器安装和校准工作完成。
六、安装使用及注意事项:
1、本传感器属于高精度仪器,安装时严禁敲击和摔打碰撞。
2、接线务必正确,错误接线可能会导致传感器内部电路损坏。
3、请不要将传感器的输出线与动力等线绕在一起或同一管道传输,也不宜在配线盘附近使
用,以防干扰。
4、电源线请选用屏蔽线或双铰线。
5、测井上方固定水位计安装基板,并保证重锤及浮子自然下垂时不与基板发生摩擦。基板与水位计固定之间的联结孔位为78*114,4-ф4.5孔,用M4*20联结螺钉。
6、测井选用直径150mm的两根(或一根直径200mm以上的)PVC管或钢管并排垂直安装。
7、测井安装应垂直,且测井内壁尽量光滑以免影响浮子及重锤上下自由移动,保证浮子及重锤不与测井壁发生摩擦。
8、在传感器上方建一防雨箱。
七、安装示意如下图:
附:485口通信协议(读取部分)
485口通信协议MOD_HH采用Modbus通信协议(RTU方式)。海河设备作为从机。
数据字节格式:起始位 数据位 (无奇偶校验位) 停止位
1 8 1
波特率:9600(可设置)
功能码03:
利用Modbus通信协议的03功能码,读取传感器或显示器的数值(1个数值)。主机的命令格式是从机地址、功能码、起始地址、字节数及CRC码。从机响应的命令格式是从机地址、功能码、数据区及CRC码。数据区的数据是二进制码,二个字节,高位在前。CRC码都是二个字节,低位在前。
信息帧格式举例:
主机呼:01 03 00 00 00 01 84 0A
站号 功能码 起始地址 读取点数 CRC校验码
低 高
从机答:
01 03 02 XX XX XX XX
站号 功能码 读单元字节 数据 CRC校验码
高(二进制)低
上面01,03,02,XX等均为一个字节。数据为两个字节,高位字节在前。每帧的开头和结尾至少有3.5个字节时间的间隔。用户在为主机编程时,除了站号(地址)和CRC校验码之外,其它字节的字符均采用上面的内容不变。主机格式中的读取点数可以为01也可以为02(02是为了兼容某些协议)。从机回答帧中的功能码(03)和读单元字节数(02)不变。CRC的检验内容包括从地址到CRC校验码之前的全部内容。